
Pneu-MC
a 3 DoF Gaylord-McKibben Actuated Robotic Arm
During the 2012-2013 school year, I was enrolled in non-matriculated studies at the University of Washington to shore up the Electrical Engineering and Control Systems side of my resume before beginning Grad School. This project was the result of my Control Systems Capstone design course, and is the culmination of the courses I took that year in Linear Systems Analysis, Control Systems, and Robotic Manipulation.
For this project I was the team lead for a small team of three. I focused on systems integration, project management, and mechanical design for this course. On the project management side, I tracked our team milestones and budgets, as well as taking care of all ordering and reimbursement paperwork through the university. For the physical design and construction, I designed, laser cut, and fabricated both the arm and test link, while my partners fabricated the pneumatic driver board, pressure feedback board, Gaylord-McKibben actuators, and tested and tuned our control system parameters. I also maintained the shared code repository, wrote the control GUI and managed all merge requests and code library maintenance.
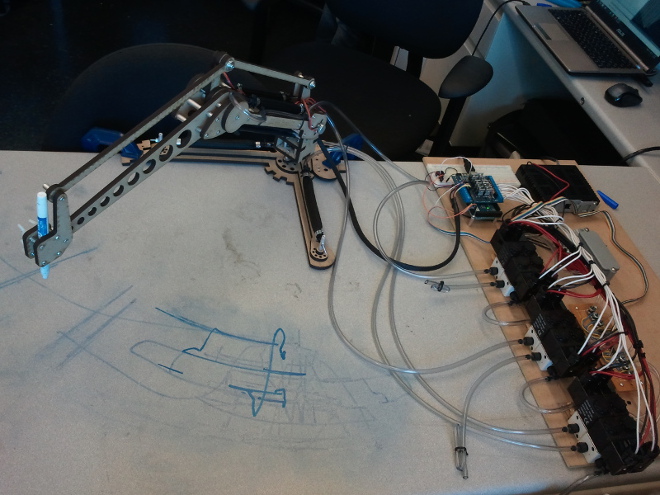
Complete System
CAD Work and GUI
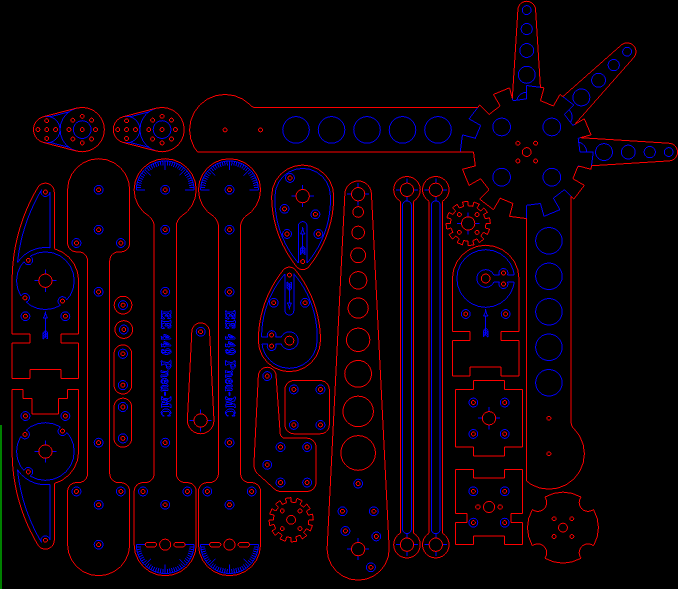 This is the 2D CAD drawing I designed to laser cut all of our custom arm components.
This is the 2D CAD drawing I designed to laser cut all of our custom arm components.
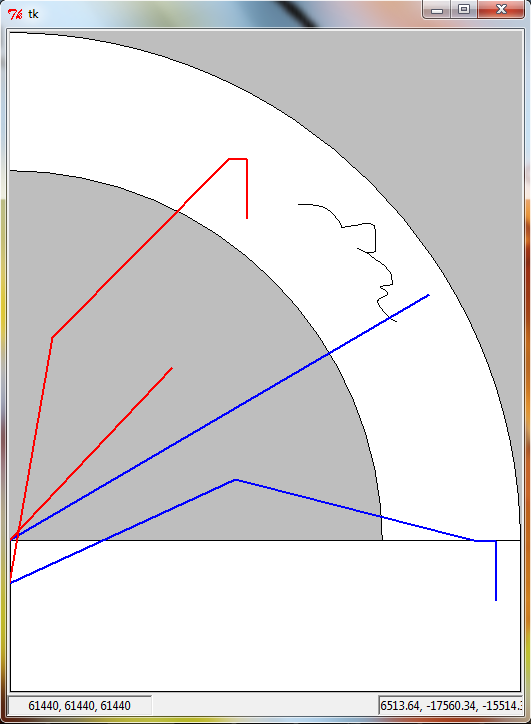
This screenshot shows the basic GUI I put together for our demonstration. The blue lines show the desired arm position generated by the mouse cursor and the IK solver
and the red lines show the current physical position of the arm.