
Google Lunar X Prize
One of the classes I have taken at CMU is Red Whittaker’s “Mobile Robots” class. Red is the team leader for the Astrobotic GLXP team, and uses this class to work on the rover for that prize. During the fall semester, we were developing a new rover prototype to meet the GLXP mobility milestone prize requirements.
At the culmination of the semester, our rover was able to successfully drive .5 km, and meet our other mobility goals when tested in a Gravity-offload rig, which simulates lunar conditions. A video of the rover development and final tests can be seen below.
Power System Development
For the prototype development, I was the power team lead and chief designer for the battery pack for the rover. The requirements for this subsystem was that it must be lightweight, vacuum and radiation tolerant, and capable of surviving the low temperature ranges experienced near the lunar polar regions.
Due to the early prototype nature of the rover, space-rated solar panels were not fabricated or installed. However, all other components of the prototype power system met their performance goals during testing, successfully charging the battery from solar panel level umbilical power, and completing a two-hour “darkness excursion”, running on battery power alone for the duration of an expected lunar shadow operation (e.g. exploring the inside of a crater, or cave entrance).
Battery Pack Layout
What follows is the draft pack design we presented at the rover’s critical design review.
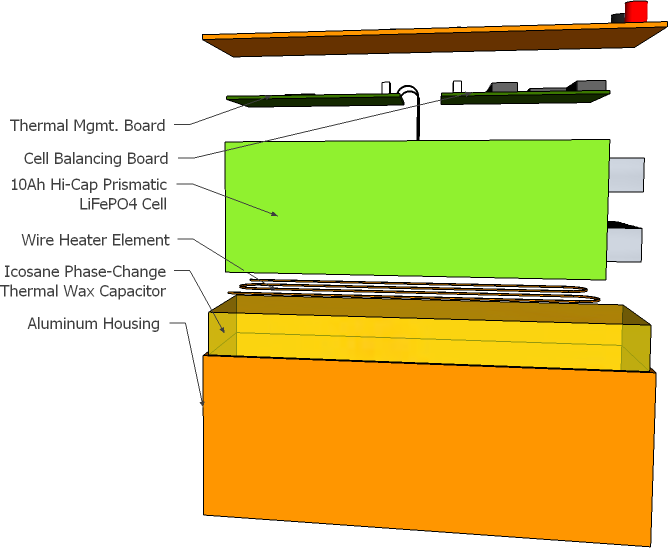
Design Specs
- Approx Dimensions: 10.75” X 4” X 4.25”
- Voltage: 24V Nominal (8 x 3.2V cells)
- ~28 Volt charging voltage
- 24 Volt minimum (Cell undervolt warning at 3.0 V)
- Capacity: 240 W/h
- Mass: 4.3 Kg
- Cells: 280 g (x8) = 2.3 Kg
- Housing: 1.1 Kg (Aluminum, wall 1/8” thick, volume ~= 407.62 cm3, Al density = 2.7 g/cm3)
- Wiring/circuitry: 300 g
- Icosane thermal material: 600 g (Estimating density at 788 kg/m3 and 718 cm3 of volume)