
Space Jockey
A Mobile Robot Platform for Spacecraft Exterior Inspection and Maintenence
The cornerstone of the MRSD Program at CMU is the Project and Systems Design courses we take. For our project, my team and I are developing a small, lightweight mobile robot designed to traverse the hulls of orbiting spacecraft and inspect them for and damage incurred during lift off or inflicted by the space environment. Our focus in approaching this problem is developing a proof-of-concept for a robust mobility solution to the problem. Most current solutions to this problem is rails or hardpoints on the spacecraft structure to navigate (e.g. Canadarm 2 onboard the ISS), but we are investigating the use of a dry adhesive developed at CMU to provide footing on hull surfaces without any built in infrastructure needed.
My role on the team was primarily one of systems integration. Because of my broad background, I was functioning as the knowledge bridge between my more specialized project partners, helping them all to work together towards the same goal. Because of this, the majority of my time was spent in mechanical and electrical design validation, prototype assembly and software integration. I was also in charge of parts sourcing and budgeting.
Design
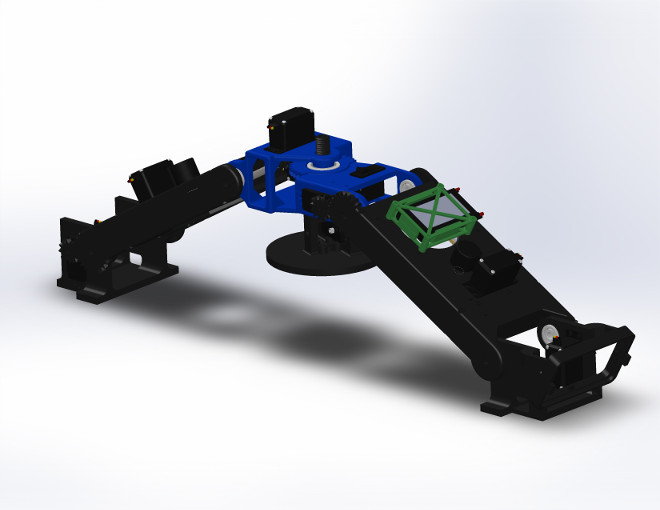
This is a rendering of our current design. We were initially planning to move in a similar direction as the Lemur IIb developed at JPL, or the AWIMR Robot developed by Lockheed Martin. However, we found that we were still able to meet our project goals with a much simpler “inchworm” style chassis design. We believe this is novel solution to the problem and it works quite well in testing. Additional chassis details may be seen on my CAD design page.
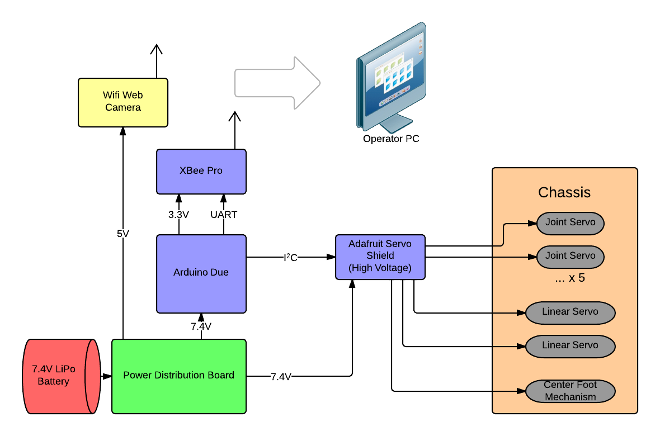 The physical system architecture of the Space Jockey Robot.
The physical system architecture of the Space Jockey Robot.
Results
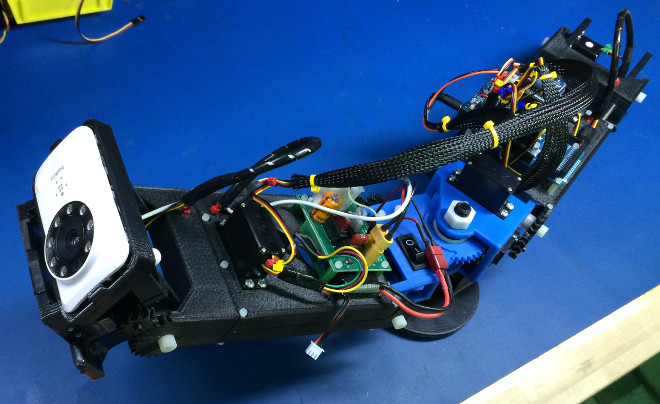 The fully assembled robot, showing the 3D printed chassis, integrated mechanical systems, wiring and control electronics.
The fully assembled robot, showing the 3D printed chassis, integrated mechanical systems, wiring and control electronics.